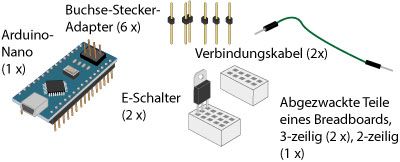
Um das zweimotorige Fahrzeug zum Selbstfahrer zu machen, werden folgende Bauteile benötigt: ein Arduino Nano, zwei E-Schalter, zwei Verbindungskabel, 5 Adapter, zwei dreizeilige und ein einzeiliger Abschnitt eines Breadboards.
Zusammenbau:

Die dreizeiligen Abschnitte eines Breadboards werden auf letzten beiden Pins des Arduino Nano links und rechts neben dem USB-Anschluss (Pin 12 und 13) gesteckt und zwar so, dass 14 der 15 Pins frei zugänglich sind. In die äußeren drei Löcher werden die E-Schalter gesteckt und zwar so, dass ihre Vorderseiten (siehe Abbildung links) in die gleiche Richtung weisen und zwar mit Blick auf den USB-Anschluss nach links.
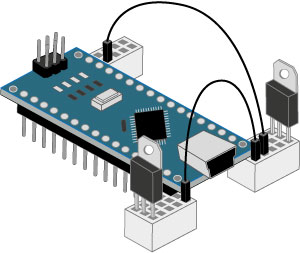
Der zweizeilige Abschnitt eines Breadboard wird so auf der entgegengesetzten Seite das Boards auf die Pins „Vin“ und „Gnd“ gesteckt, dass acht der zehn Steckplätze frei zugänglich sind.
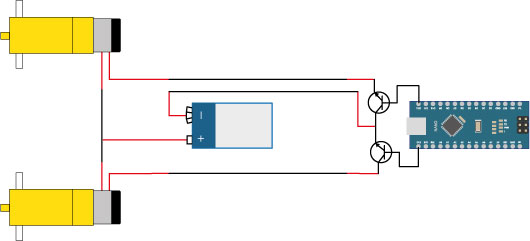
Die Verkabelung ist in der untenstehenden Zeichnung dargestellt: Je ein Anschluss beider Motoren ist mit dem Pluspol der Batterie verbunden. Die noch freien Anschlüsse sind zu den mittleren Pins der E-Schalter geführt. Die äußeren Pins der E-Schalter sind mit dem Minuspol der Batterie verbunden.
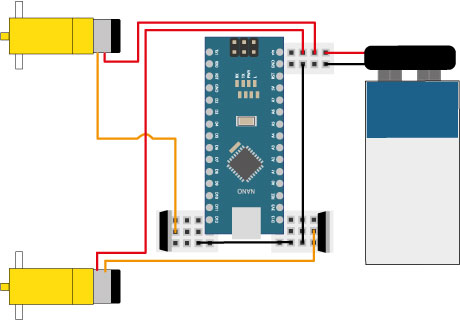
Diese Verdrahtung entspricht exakt dem, was bei der händischen Fernsteuerung zur Anwendung gekommen ist.
Aufgabe:
Mache ein Foto von deinem fertigen Fahrzeug, poste es in deinem Lerntagebuch und kennzeichne darin Motoren, Breadboard, Mikrocontroller-Board, E-Schalter und Batterie.